几乎世界上每个地区都在争取更严格的环境法规,欧洲是其中的佼佼者,而其他地区的温室气体(GHG)标准正在紧随其后。作为另一个影响因素,美国在现任新政府领导下被期望更严格的温室气体排放标准,这可能导致尤其是混合动力汽车的复苏增长,因为这种车辆类别可以作为走向BEV过渡阶段中的早期可用解决方案。温和的混合动力汽车(48V系统)虽然有助于达到新的温室气体排放标准,但从OEM的角度来看,还不足以避免因不符合各自国家的CO排放法规而产生罚款。
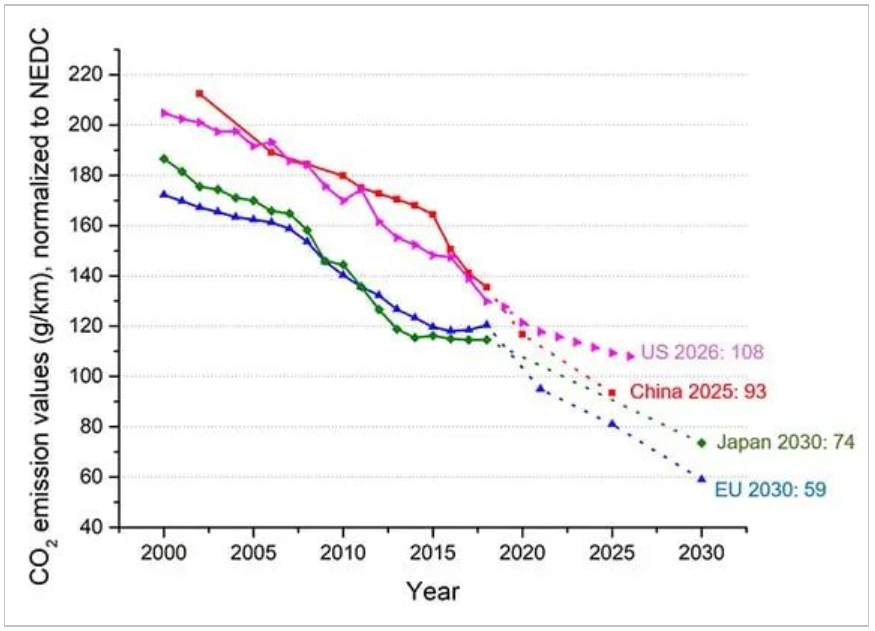
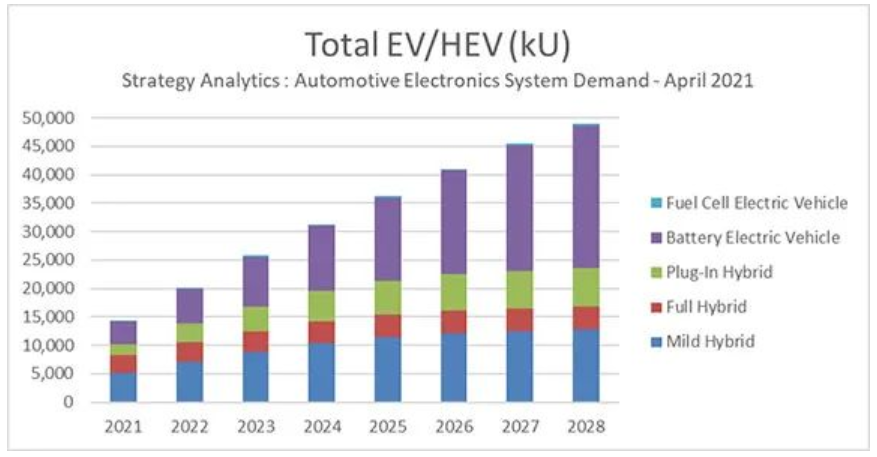
随着温室气体趋势的加速,全球xEV市场可能进入漫长的扩张时期,电池成本也将下降。从2025年开始,更加严格的限制(燃油经济性标准/BEV销售法规)在各个国家将导致xEV的需求增长。随后随着核心技术(包括电池)的价格逐渐降低,从2025年开始向独立增长模式过渡。
尤其是,PHEV和FHEV取决于各自的系统概念,从协作控制策略(ICE和电驱动)的角度来看,具有更高的复杂性,此外,由于ICE和电驱动器功能的组合/添加的原因,它们对应用程序组件的空间限制更为敏感。这不仅适用于机电组件,而且还适用于电子设备,例如数字芯片组,模拟和电源组件。
上述所描述的系统复杂性来自以下上层功能:在车辆减速时,动能通过电动机转换为电能并存储在电池中。在加速过程中,来自电池的电能用于辅助ICE,从而节省了燃油消耗。拥有高功率电动机的FHEV意味着高发电机容量,因此在减速期间可以回收(或恢复)更多的动能,从而使燃油效率提高百分之几十。
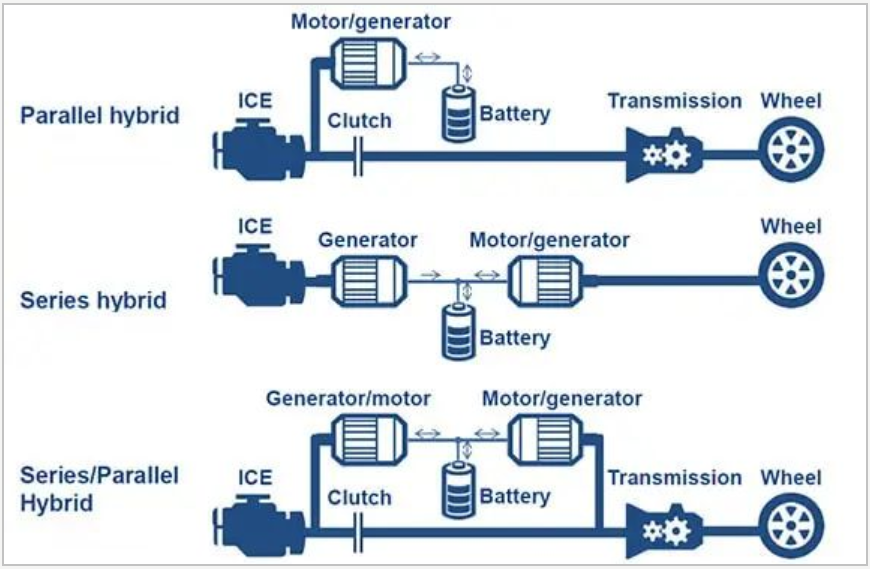
最简单的是并联混合系统(Parallel hybrid system)。电机与ICE并联放置。电动机/发电机通过利用来自电池的电能来辅助加速,并且在减速期间通过将电动机用作发电机来对电池进行充电。该系统的好处是成本更低,控制复杂度更低。
在串联混合动力系统(Series Hybrid system)的情况下,由ICE产生的动能通过发电机转换为电能,然后该电能被另一台电动机再次用于产生动能。这看起来似乎在浪费成本和能量。但是,这种方法的优势在于,它可以在最省油的速度/扭矩范围内运行ICE。这是由于ICE在低速(例如1500rpm),或者高速(例如 4000rpm),还有低扭矩范围的燃油效率很低。
串联/并联混合动力系统(Series/Parallel hybrid system)是最复杂的系统。当ICE在节油的速度/扭矩范围内运行时,ICE的输出可通过离合器和变速箱直接传递至车轮。如果需要扭矩辅助,则电动机可以协助加速,而ICE可以像并联混合动力系统一样节省燃料。当车速非常慢时,离合器会松开,这时系统的作用类似于串联混合动力系统,以避免在低燃油效率范围内运行ICE。
在串联和串联/并联混合动力系统配置的情况下,通常需要一个严格且相互依赖地控制两个电动机/发电机装置的组合。
从前面介绍的牵引电机系统概念来看,很明显,由于两个实体之间的通信负荷很大,并且要加大诊断的力度去维护目标安全级别(ASIL-level),尤其是在串联/并联混合动力系统的情况下,各自的控制和同步工作趋向于复杂。
优化这些工作的一个显而易见的解决方案是将两个逆变器控制系统集成到一个ECU中,由一个高度专业化的微(MCU)进行操作。通过使用这种概念,可以在一个微内实现两个逆变器控制环路之间的同步,从而导致高通信带宽和缩短等待时间。此外,通过选择符合安全级别ASIL的目标设备,诊断和功能安全概念将变得更加简单和直接。集成解决方案的另一个好处当然是高度优化的物料清单(BOM),同时减少了零件空间需求,这对于整个系统概念而言都是非常有益的效果。
HEV专用MCU的一项关键是将电机控制算法的矢量数学计算过程分流到专用处理IP上。通过使用这种方法,MCU可以配备较少数量的CPU内核,同时承担上述其他软件任务。
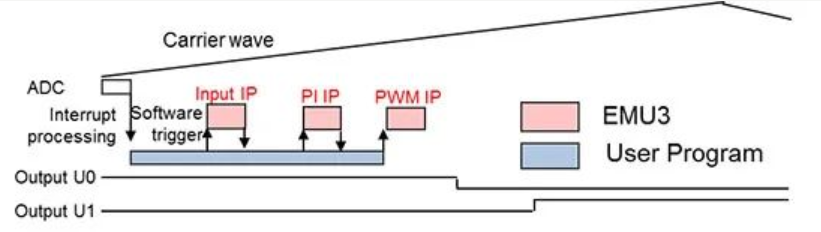
嵌入式“增强型电机控制单元”(EMU Gen3)是一组单独的电机控制加速器模块,这些模块使用矢量控制算法计算三相PWM比较值,并根据由A/D转换器测得的电机电流值生成矩形波模式。此外,通过执行位置传感器接口功能的集成“解析器到数字转换器”(RDC3A)获得电机的角度值。三相电机计时器TSG3使用EMU3的计算结果来输出PWM和矩形波。
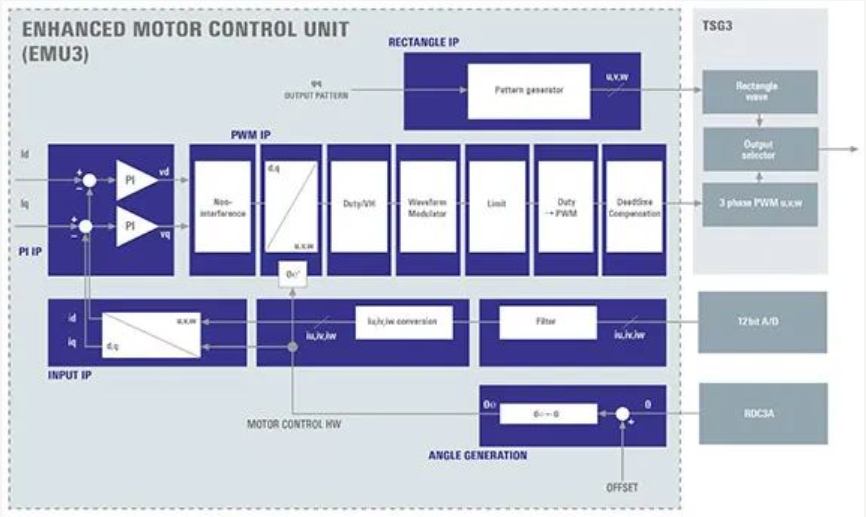
EMU3 的IP可以结合其特定功能块和用户特定软件干预来行使电动机控制功能。因此,可以实现结合了硬件加速和各个用户软件的灵活控制概念。
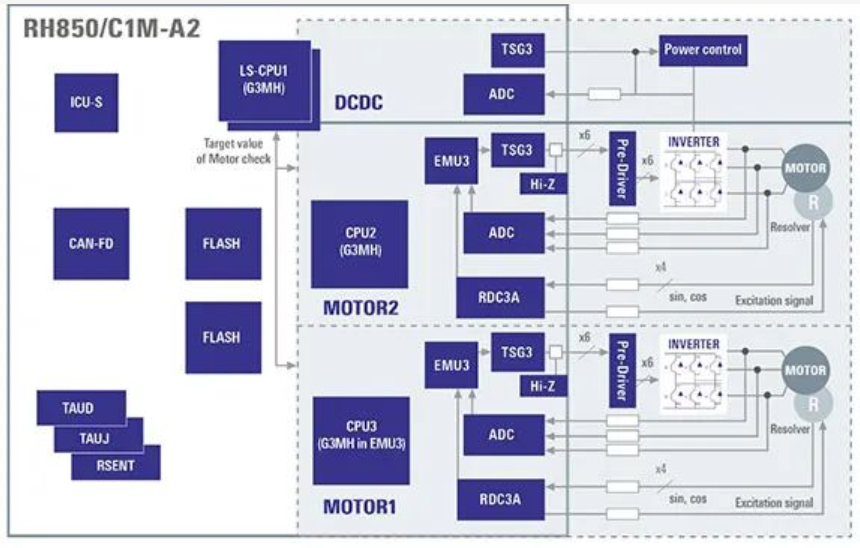
实现双电动机/发电机控制能力的关键解决方案是基于先前介绍的电动机控制IP(“EMU3”)以及嵌入式位置传感器接口如何集成到微系统中。
CPU2和CPU3分别控制一台电动机。通过使用EMU3,性能密集型电机控制算法(例如用于产生PWM模式的Park/Clark变换)的处理已从CPU转移到EMU3。这允许其他重要软件任务(例如诊断处理)由CPU执行。
CPU1还可用于其他功能:例如,实现DC/DC转换器控制作为可选用的集成附加功能,以优化整个HEV系统布局。
RDC3A是MCU集成的(与Tamagawa AU6805等效)双旋转变压器数字转换器接口,或更概括地说,是电动机位置传感器接口,能够连接到模拟旋转变压器或电感式位置传感器信号。
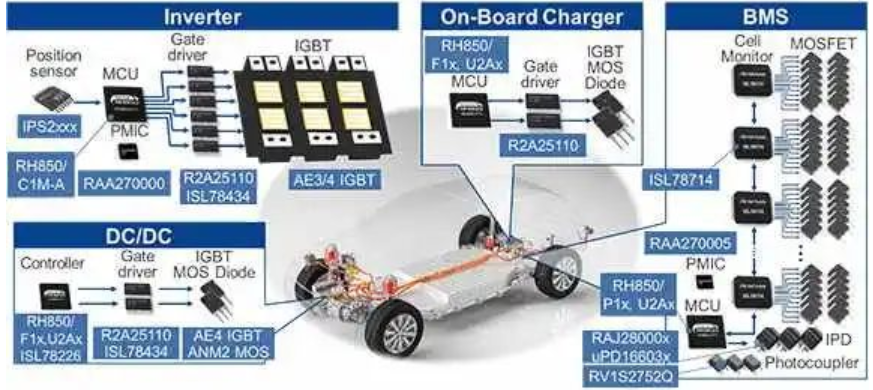
在瑞萨(Renesas),40纳米微RH850/C1M-Ax作为HEV控制概念已经过多年验证。该器件以及即将发布的28nm下一代器件,专注于牵引电机的逆变器控制功能。合适的PMICs,栅极驱动器和IGBT器件以及逆变器turnkey解决方案可以极大的减少客户的研发工作(见图7)。
基于电驱动/ICE系统组合运行的混合动力汽车由于系统复杂性的增加,特别需要经济高效且尺寸优化的推进系统。牵引逆变器专用的高性能微(MCU)带有专用的用于矢量数学计算的硬件加速器功能,可帮助实现整体优化的电子和机电系统设计。
